MTP
为什么要做 MTP
在学习具体的方法前,我们首先了解下为什么要做MTP(Multi-Token Prediction)?
背景
我们都知道,当前主流的大模型(LLMs)都是 decoder-base 的模型结构,也就是无论在模型训练还是在推理阶段,对于一个序列的生成过程,都是 token-by-token 的。每次在生成一个 token 的时候,都要频繁跟访存交互,加载 KV-Cache,再通过多层网络做完整的前向计算。对于这样的访存密集型的任务,通常会因为访存效率形成训练或推理的瓶颈。
针对token-by-token生成效率的瓶颈,业界很多方法来优化,包括减少存储的空间和减少访存次数等,进而提升训练和推理性能。
MTP方法的作用
本文要学习的MTP方法,也是优化训练和推理效率的一个分支系列。
核心思想:通过解码阶段的优化,将1-token的生成,转变成multi-token的生成,从而提升训练和推理的性能。具体来说,在训练阶段,一次生成多个后续token,可以一次学习多个位置的label,进而有效提升样本的利用效率,提升训练速度;在推理阶段通过一次生成多个token,实现成倍的推理加速来提升推理性能。
本文主要通过3篇 paper 把 MTP 业界探索的主线讲清楚;最后再详细讲解和对比下 deepseek 的 MTP 方法。
Blockwise Parallel Decoding
Google 的:Blockwise Parallel Decoding for Deep Autoregressive Models1
这是一篇重点研究推理阶段加速的方法,从论文标题 Blockwise Parallel Decoding 可以看出隐含在推理阶段不是 token-by-token 生成的方式。我们先看下论文中的网络结构图(图1):
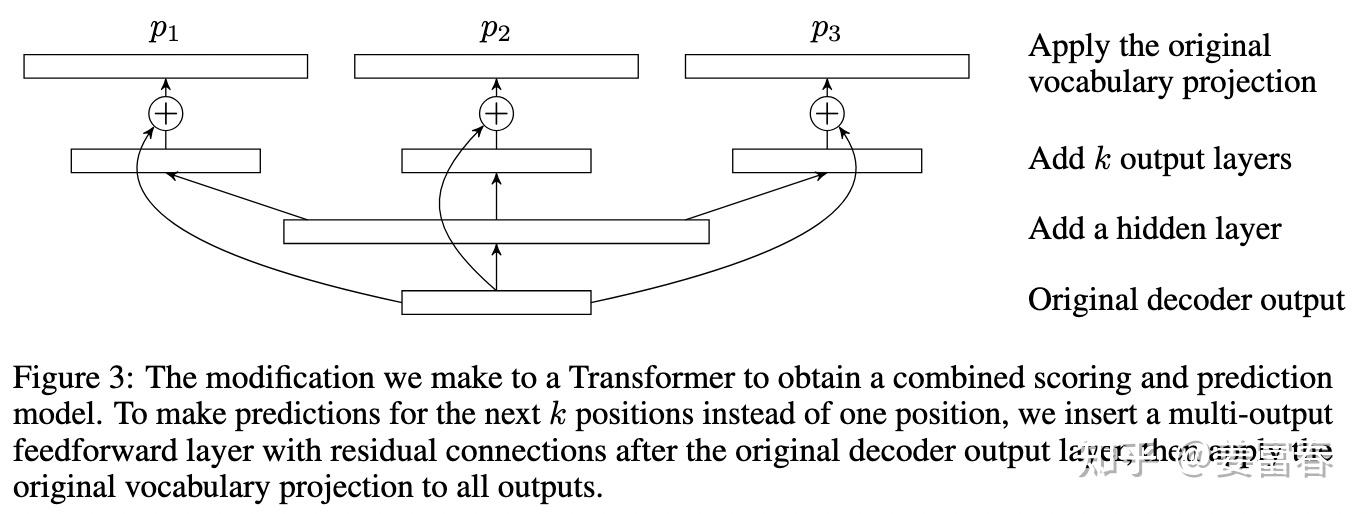
从上图能看到 Blockwise Parallel Decoding 网络是个并行计算的过程,但遗漏了很多文中表述的细节,也不像是在描述一个 Transformer base 的网络。
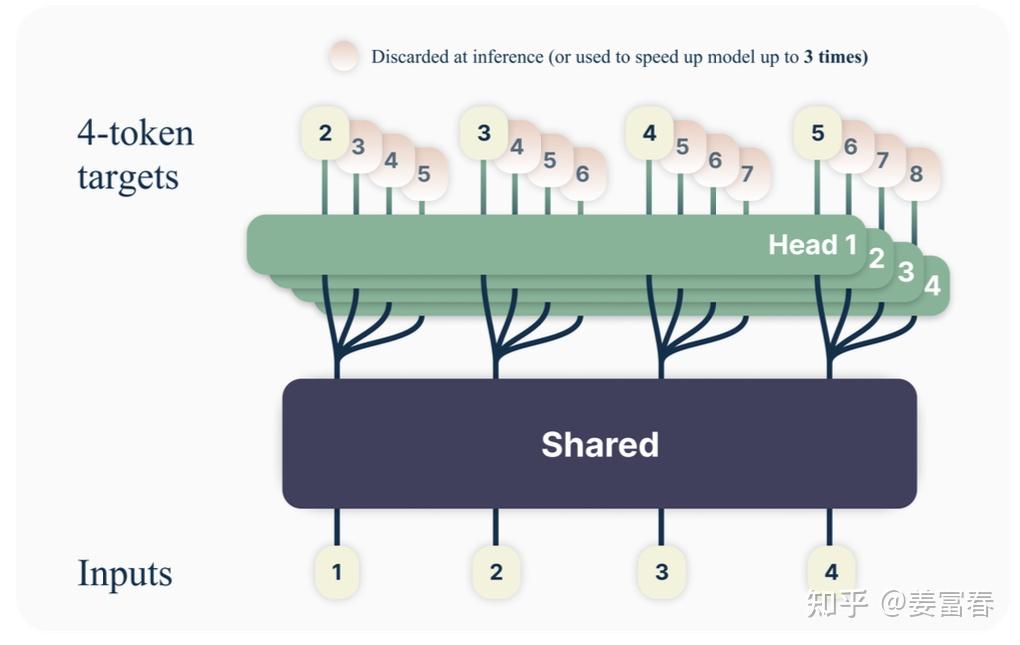
为了直观理解作者的方法,也更符合当前描述tranformer网络结构的方式,我按照自己的理解补充了一些细节,如图2所示:
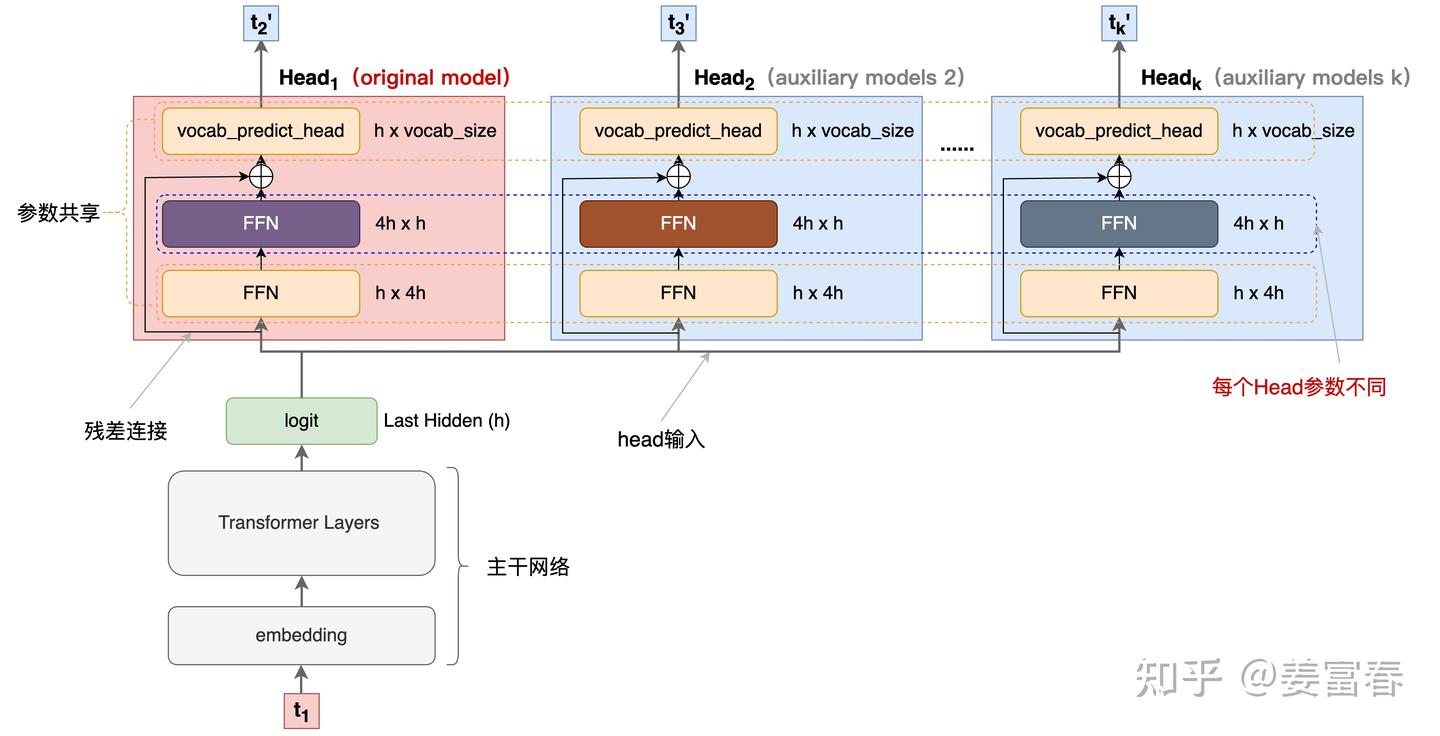
基于上图我们看看网络结构的细节:
- 主干网络是训练好的多层 decode-only 的 Transformer 网络,经过多层前向计算后,最终隐层输出维度的 last_hidden_state。
- 上面接了多个输出 Head,每个 Head 负责预估一个 token, $Head_1$ 负责预估 next token,$Head_2$ 负责预估 next next token ,以此类推
- 每个Head 有三层:
- 首先是**一个共享的 FFN 层,将 logit 做宽映射 $h \to 4 h$
- 然后再过一个FFN 层,将 logit 维度还原 $4h \to h$ ,注意,这层 FFN 每个 Head 是特化的、非共享的。该层计算的结果再与原始模型的 logit 做残差连接;
- 最后再将结果送入到 vocabulary projection 包括一个线性变换和一个 Softmax),预估每个词的概率分布,最终通过某种采样方法(如:greedy,beam search 等)生成 token。注意,这个词表投影层是原预训练网络(original model)的投影矩阵+Softmax,多 Head 是共享的。
- 主干网络+ $Head_1$ 是 original model,也就是 pretrain 的模型。其他 Head 是论文说的辅助网络(auxiliary model)
从上图2,我们可以看到,输入一个 $t_1$ 并行的多个头一次输出 $t’_2, t’_3, …, t’_k$
理解了网络细节,再看看论文中的并行推理过程就很好理解了。推理过程,论文中给出了三阶段描述,如图3所示:
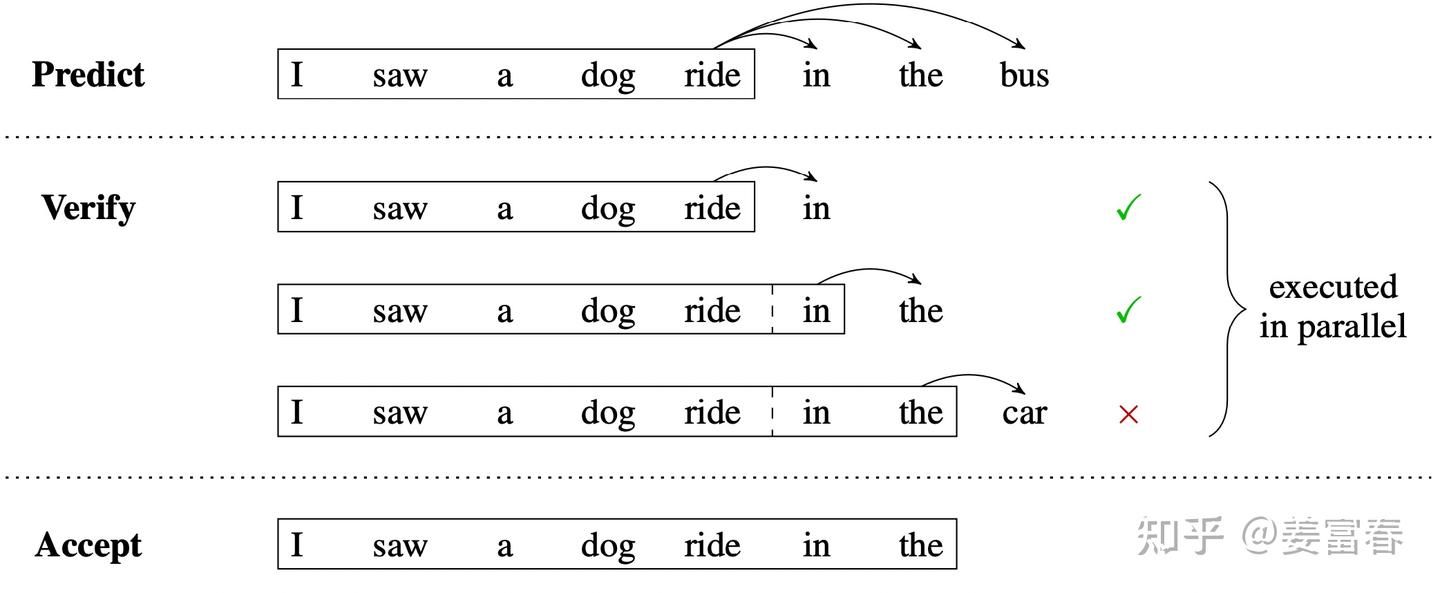
推理过程
- **阶段1:predict **,利用 $k$ 个 Head 一次生成 $k$ 个 token,每个 Head 生成一个 token
- **阶段2:verify,**将原始的序列和生成的 $k$ 个 token 拼接,组成
Pair(sequence_input, label),如上图 Verify 阶段- 黑框里是
sequence_input,箭头指向的是要验证的label。 - 将组装的 $k$ 个组成一个 Batch,一次发给 $Head_1$ 做校验(Check $Head_1$ 生成的 token 是否跟
label一致)
- 黑框里是
- **阶段3:accept: 选择 $Head_1$ 预估结果与一致的最长的 $k$ 个 token,作为可接受的结果。
接下来我们看下相比于token-by-token的生成,上述流程推理阶段加速效果怎么样?
假设:我们要生成的序列长度为:$m$ ,并行 Head 数为:$k$ 。
我们只考虑最优情况下:所有辅助Head预测结果跟Head1完全一样,即Verify阶段全部token都一次性被接受
- 原生成方法:token-by-token 生成,需要 $m$ 步执行
- **本文的方法:**每 $k$ 个 token 执行一次上述三阶段过程,predict 阶段执行1步产出多个 Head 的输出, verify 阶段并行执行1步,accept 阶段不耗时。所以最终需要 $2m/k$ 步执行
- 推理加速效果:$m \to 2 m/k$ ,当 $k=4$ 的时候,推理可提速1倍
注:这里我们注意到,token-by-token 生成过程每一步的计算更轻量,而本文的方法 Predict 和 verify 要么计算多头,要么输入一个 Batch,在衡量计算效率上,是否要考虑不同任务步骤的时间差异? 答案:这个时间差异我们一般是忽略掉的,认为不同任务每个步骤执行时间一样。因为GPU的设计就是擅长并行计算的,计算一个批次序列和计算单个序列时间差异可以忽略,计算多头和单头时间差异也可忽略。而且GPU计算过程一般都是访存瓶颈,计算过程在整体执行时间消耗相对都很短。
作者也提出,可以进一步重叠第 $n$ 步的 verify 阶段和第 $n+1$ 步的 predict 阶段,能进一步提高推理性能。如图4所示:
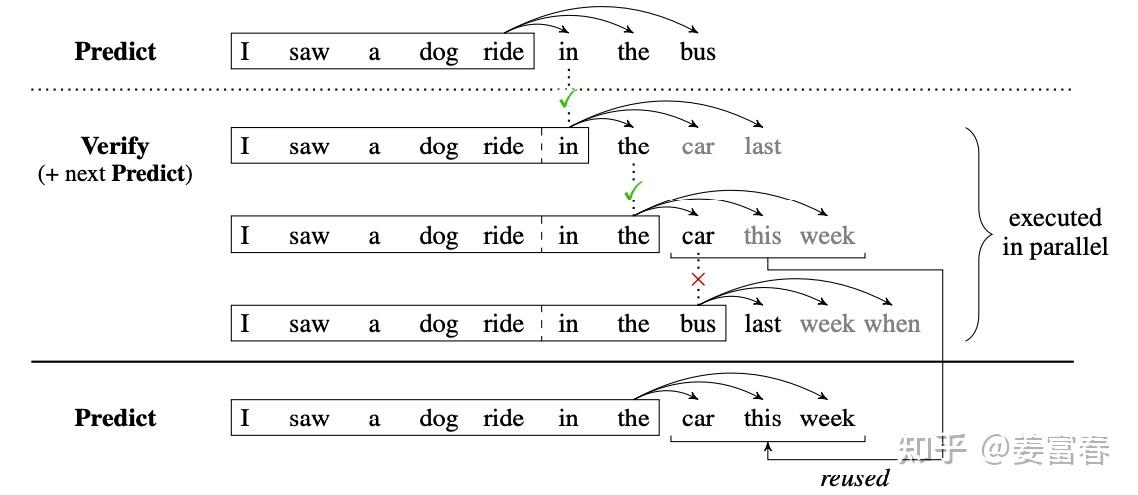
我们看看重叠 $n$ 步的 verify 阶段和第 $n+1$ 步的 predict 阶段的过程:
- **阶段1:predict ,第一次执行推理,**利用 $k$ 个 Head 一次生成 $k$ 个 token,每个 Head 生成一个 token
- **阶段2:verify,**将原始的序列和生成的 $k$ 个 token 拼接,组成
Pair(sequence_input, label),如上图 Verify 阶段- 第一个箭头指向的是要预估的 label,将组装的多个
Pair(sequence_input, label)组成一个 Batch,一次发给 $k$ 个 Head。 - $Head_1$ 生成 next token,同时承担 verify 角色跟做校验。
- $Head_2 ~ Head_k$ 预估 Batch 中每个序列的后续的 token。
- 第一个箭头指向的是要预估的 label,将组装的多个
- **阶段3:accept: 选择 $Head_1$ 预估结果与一致的最长 $k$ 个 token 作为可接受的结果。然后从 Batch 内取出该条 Sequence(包括已经接受的序列和 $k$ 个 Head 生成的 token)作为下一个阶段送给 verify 的输入,如图 reused 箭头的操作)
- 循环上述过程,直到生成eos终止标记。
我们再看看上述流程的推理效率:(这里也考虑最优情况,即所有辅助模型生成的token都被接受)
模型第一次推理只执行 predict 阶段( 1 步),然后进入 verify 和 predict 重叠的阶段,每次处理序列往前走 $k$ 长度,直到生成终止标记(共 $m/k$ 步)。总推理步数 $1+m/k$
- 推理加速效果:$m \to 1 + m/k$ ,当 $k=4$ 的时候,推理可提速 3 倍
至此,我们完整描述了 Blockwise Parallel Decoding 的核心内容,该方法主要是为了做推理阶段的并行加速而设计的。虽然命名上没有遵循 MTP类,但后面一些演进的方法比如 Speculative Sample 和下面要介绍的 Meta’s MTP 等,都有该方法设计的影子。
Meta MTP
首先简述该工作的 motivation
传统方法的问题(预测下一个token):
- 训练阶段:token-by-token生成,是一种感知局部的训练方法,难以学习长距离的依赖关系。
- 推理阶段:逐个token生成,推理速度较慢
MTP方法(一次预测多个token):
- 训练阶段:通过预测多步 token,迫使模型学到更长的 token 依赖关系,从而更好理解上下文,避免陷入局部决策的学习模式。同时一次预测多个 token,可大大提高样本的利用效率,相当于一次预估可生成多个
<predict, label>样本,来更新模型,有助于模型加速收敛。 - 推理阶段:并行预估多个token,可提升推理速度
方法实现
首先看下模型架构,如图5所示。一个共享的transformer的主网络,上面接入4个并行预估头,针对输入token $t_i$ 分别预估后续的 $t_{i+1}, t_{i+2}, t_{i+3}, t_{i+4}$。
我们再根据论文中的描述,详细解释下模型的网络结构:
- 主干网络就是训练好的decoder-only的多层Transformer的网络,$t$个输入token $x_{t:1}=x_t, …, x_1$ 经过主干网络计算,最终输出隐层表示:$z_{t:1}$(来自于$x_{t:1}$编码结果)。
- $z_{t:1}$ 上面接了多输出Head,每个Head负责预估一个token,$Head_1$ 负责预估 next token,$Head_2$ 负责预估 next next token ,以此类推
- Head是一个Transformer层(包括MHA + 2层FFN),且每个Head的Transformer层是独立的,非共享的,经过这层处理后的结果记作:$f_{h_i}(z_{t:i})$
- 最后再将 $f_{h_i}(z_{t:i})$ 送入到词表投影层($f_u$ 包括1个投影矩阵+1个Softmax),预估每个词的概率分布。最终通过某种采样方法(如:greedy, beam search等)生成token。注意,这个词表投影层是原预训练网络(original model)的投影矩阵+Softmax,多Head是共享的。
这里我们注意一个细节,上面描述的网络结构,与2.1节Blockwise Parallel Decoding方法描述的网络结构,仔细对比,发现除了符号不一样,好像网络结构并没有什么差别。
为了清晰地理解本文的方法的模型细节,按图2类似的作图风格,本人重新画下 Meta’s MTP 网络框图,如下图6所示:
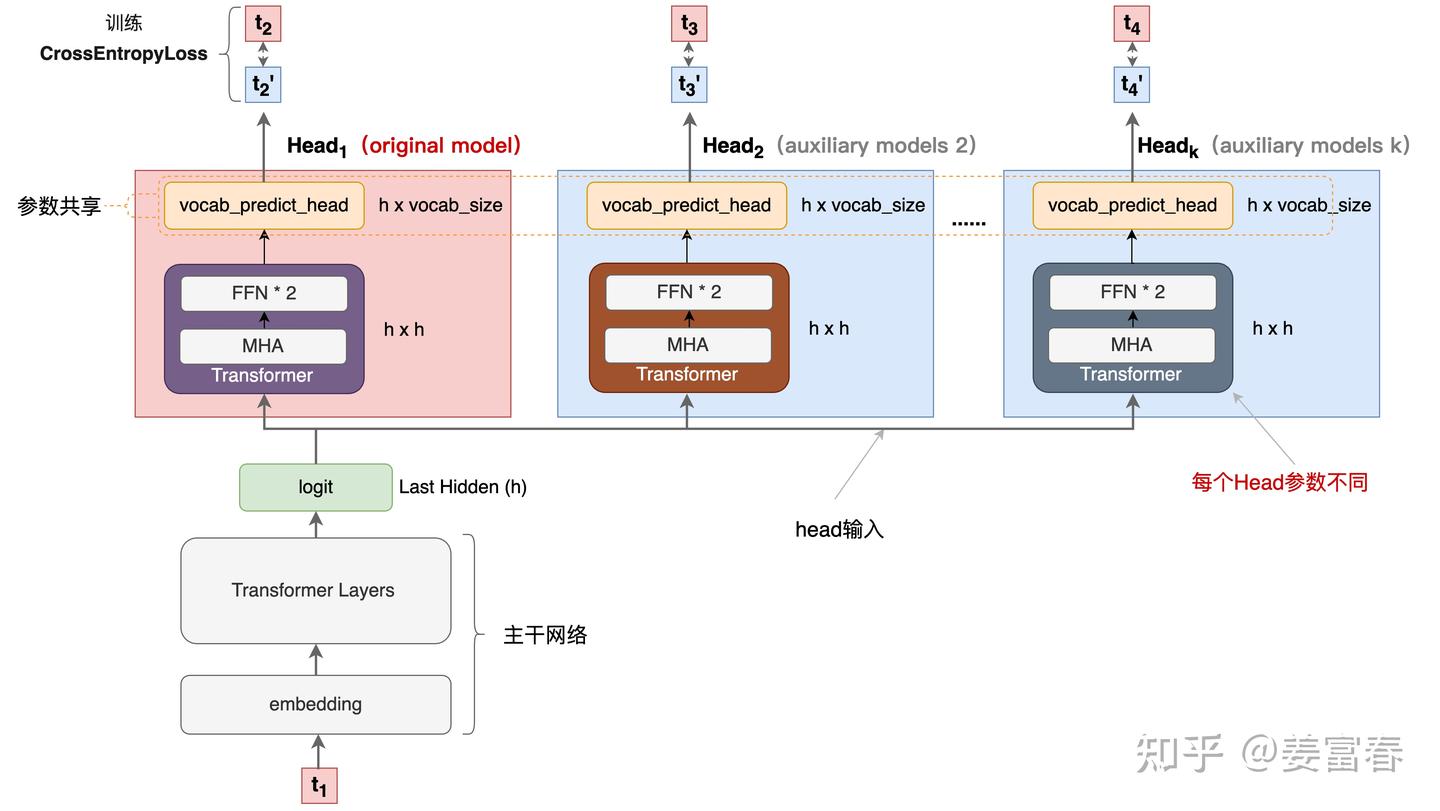
我们仔细对比下图2和图6,网络结构基本一致,有两个微小的不同:
- 图2是2层FFN, 图6是一个Transformer
- 图6 除了可按图2方法一样可做并行推理,本文也重点考虑模型加速训练的优化,在模型训练时,多个头都会并行计算loss时,提升样本利用效率和加速模型收敛。
至此,我们讲完了两篇paper的主要工作,方法比较直观,接下来,我们再来看看DeepSeek 的 MTP
DeepSeek MTP
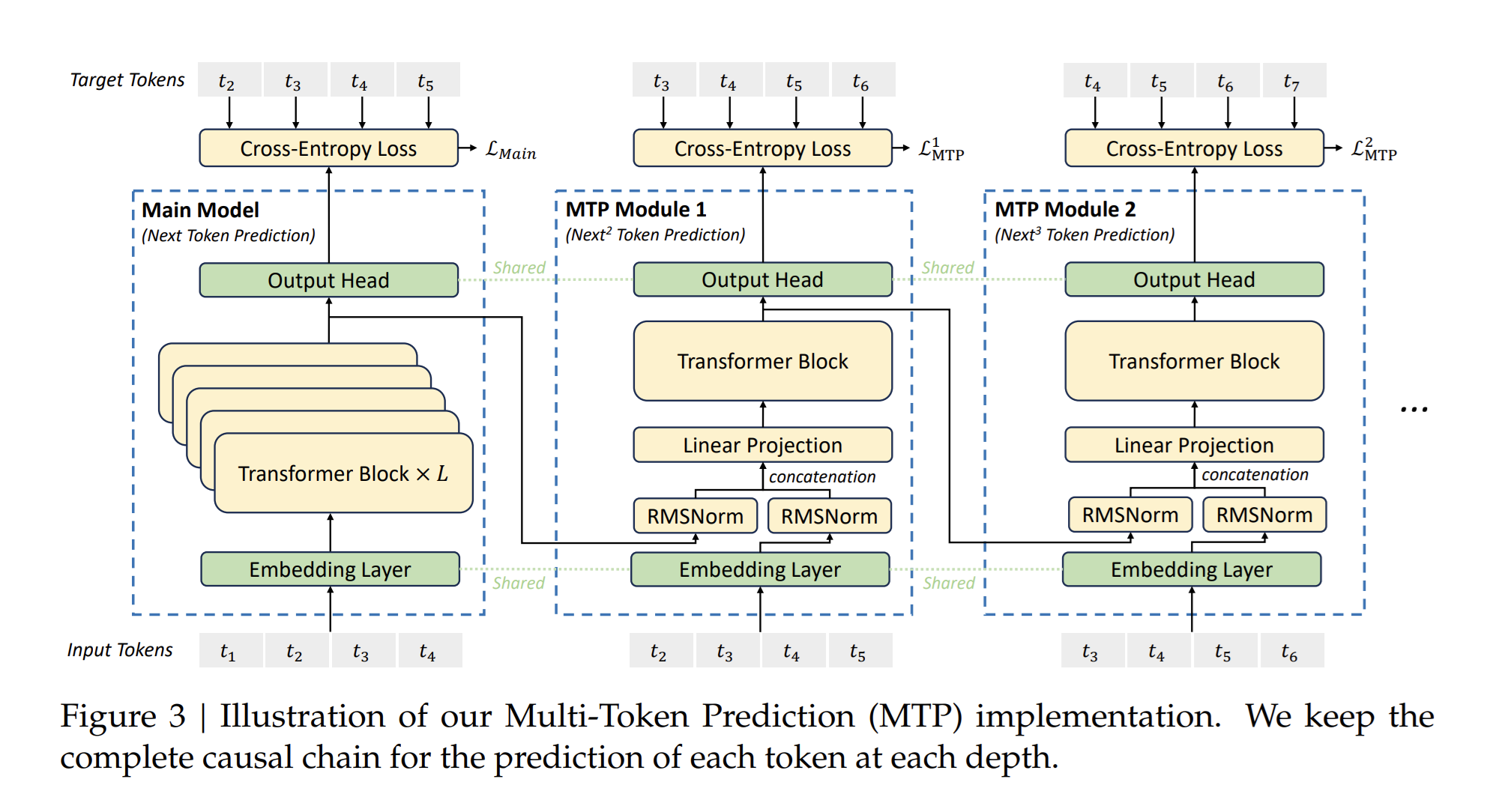
首先我们还是从网络结构出发,看看DeepSeek的MTP的设计。如下图7所示,乍看上去也是多头,但结构略复杂。且论文中也强调,在实现上保留了序列推理的连接关系**(causal chain),**如图中,从一个Module链接到后继Module的箭头。
MTP 模块细节实现
如上图7所示,用 $D$ 个顺序的模块,预测 $D$ 个 tokens。每个 MTP 模块的具体结构(如图7红框内):
-
输入token首先接入一层共享的embedding layer
-
对于第 $i$ 个 token $t_i$ 和第 $k$ 个预测深度
- 我们首先将第$k-1$层的的隐层输出 $h_i^{k-1} \in \mathbb{R}^d$ 做归一化处理 $RMSNorm(h_i^{k-1})$
- 再对第 $i+k$ 位置的 token embedding:$Emb(t_{i+k}) \in \mathbb{R}^d$ 做归一化处理 $RMSNorm(Emb(t_{i+k}))$
- 将上述两个结果 concat 后,通过投影矩阵 $M_k \in \mathbb{R}^{d \times 2d}$ 做一层线性变换得到 $h_i^{‘k} \in \mathbb{R}^d$
-
上述过程如下公式 (21) 所示(当$k=1$时,$h_i^{k-1}$ 对main model的隐层表征)
$$\mathbf{h}_i^{‘k} = M_k \big[ RMSNorm(\mathbf{h}i^{k-1}) ; RMSNorm(Emb(t{i+k})) \big]$$
-
再将 $h_i^{‘k}$ 输入到 Transformer 层,获得第 $k$ 个预测深度的输出:$h_i^k$ $$\mathbf{h}_{1:T-k}^k = \text{TRM}k(\mathbf{h}{1:T-k}^{‘k})$$
-
最后将 $h_i^k$ 通过一个各Module共享的映射矩阵 $\text{OutHead} \in \mathbb{R}^{V \times d}$ 变换,再过 $softmax(\cdot)$ 处理,计算出词表$V$维度的输出概率,这里注意:$h_i^k$ 的label是对应$i+1+k$位置的token。如公式 (23) 所示 $$P_{i+k+1}^k = \text{OutHead}(\mathbf{h}_i^k). \tag{23}$$
我们先解释下变量:$T$ 是序列长度,$k$ 是预测头的深度。为了理解上面带切片下标的公式。
- $h_i^k$ 是第 $i$ 个 token 在第 $k$ 预测深度上输出的表征,是要预测序列中第 $i + k$ 位置的 token 的。
- 由于序列总长度为 $T$,所以第 $k$ 预测深度最长处理的输入 token 位置 $i$ 应该满足 $i + k \leq T$。所以第 $k$ 预测头能接受的 $i$ 的范围为:$i \leq T - k$,也就是 $i \in [1, T - k]$
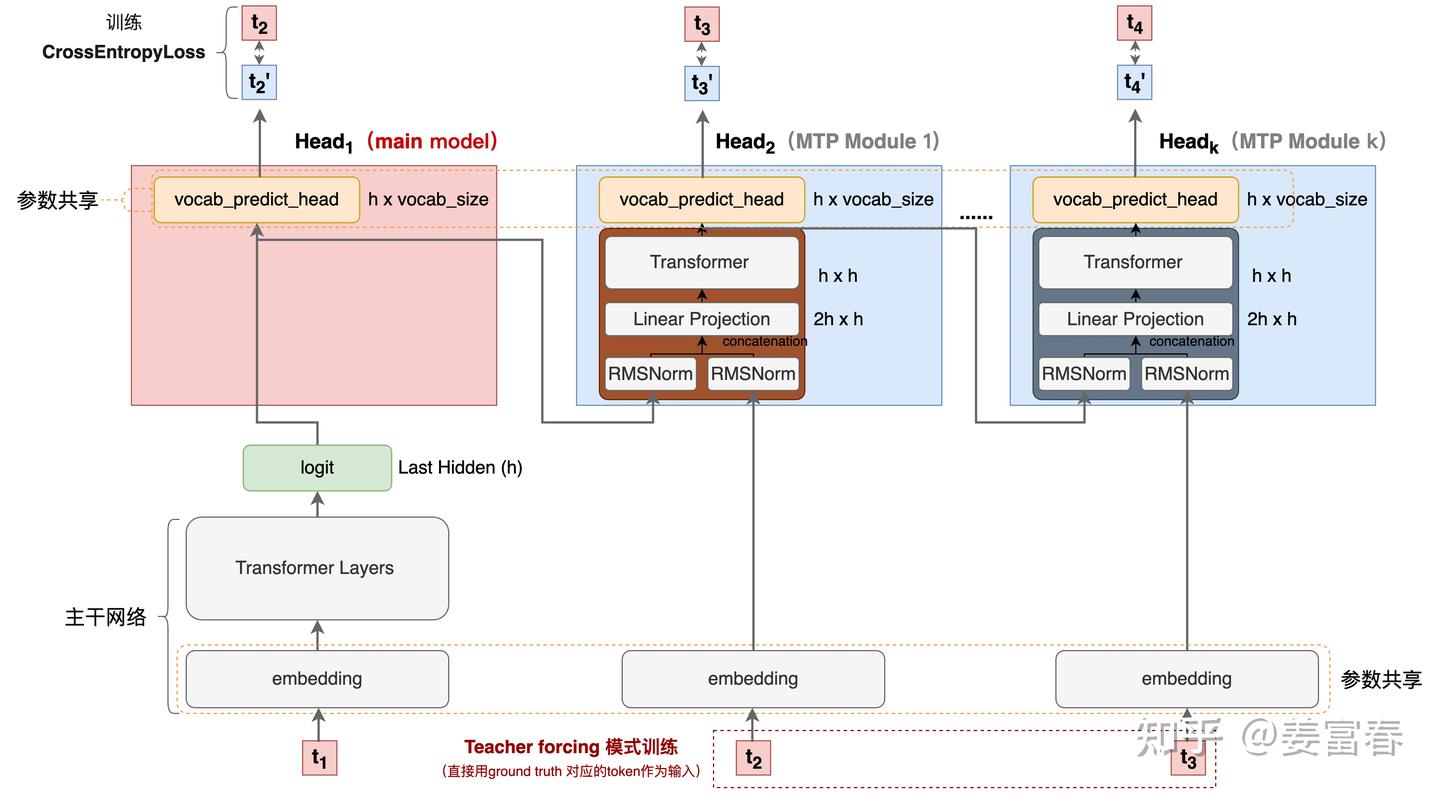
下面举个简单的例子:$T = 10$,表示长度为10,模型训练期间样本构建方式,如下图8所示。Main Model是预测next token,所以input和label序列错1位。MTP Module 1是预测next next token,input和label序列错2位,在T+1总长度下,输入的后续token和输出的前序token都要按错位做裁剪。
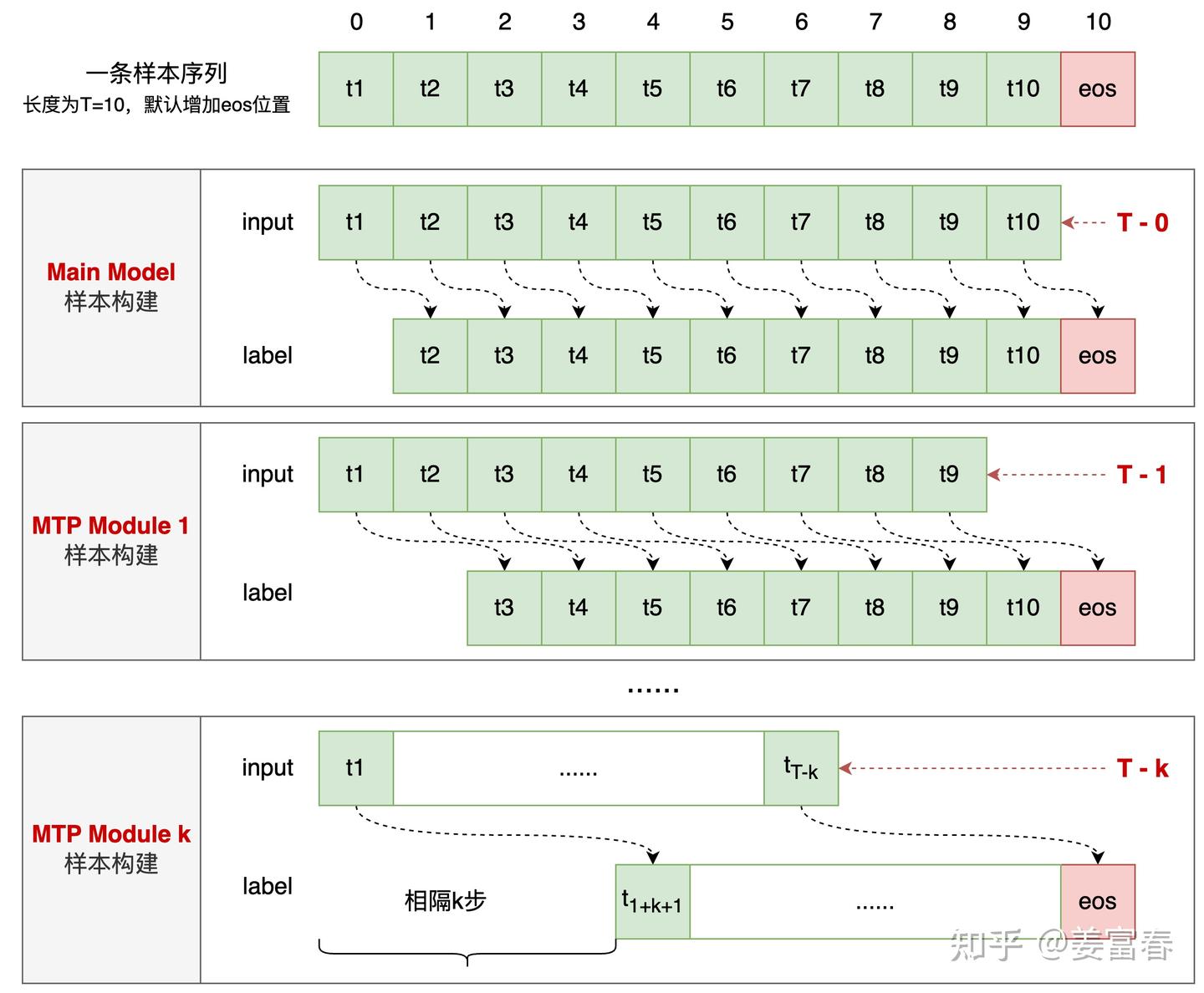
通过 CrossEntropyLoss 计算每个 MTP Module Head 的损失, 如公式(24)所示 $$\mathcal{L}{\text{MTP}}^k = \text{CrossEntropy}(p^k{2+k:T+1}, t_{2+k:T+1}) = -\frac{1}{T} \sum_{i=2+k}^{T+1} \log p_i^k[t_i], \tag{24}$$ 再解释下公式(24)的下标
- $2 + k: T + 1$ 表示 label 范围的下标参考上图8, 就非常好理解:
- 起始下标 $2 + k$:MTP Model 1是预测 next next 的 token,也就是输入第一个 token 是 $t_1$,预测第一个 label token 是 $t_{2+1} = t_3$,以此类推,MTP Model k,输入第一个 token 是 $t_1$,预测第一个 token 是 $t_{2+k}$
- 结束下标 $T + 1$:所有 sequence 样本默认在原序列上额外增加的一个 eos token,所以 token 下标为原序列长度 $T + 1$
$$ \mathcal{L}{\text{MTP}} = \frac{\lambda}{D} \sum{k=1}^{D} \mathcal{L}_{\text{MTP}}^{k} $$
MTP 模型推理
DeepSeek V3中强调, MTP 的设计主要是为了训练过程能加速收敛, 更充分的使用训练样本。所以针对推理阶段只是简单介绍了一段。这里也稍微展开讲下推理的过程。
DeepSeek V3推理可以有两种方法:
方法1: 直接把MTP Model头全部删掉, 模型变成了一个Predict Next Token的Main Model。然后部署模型做推理, 这个就跟正常LLM模型推理一样。没有什么加速效果
方法2: 保留MTP Model做self-speculative decoding, 这样充分使用多Head预测能力, 提升推理加速性能。类似2.1中介绍的三阶段
- 阶段1: predict, 利用 $k$ 个 Head 一次生成 $k$ 个 token, 每个 Head 生成一个 token
- 阶段2: verify, 将原始的序列和生成的token拼接, 组成多个 $Pair < sequence_input, label >$, 将组装的多 $Pair < sequence_input, label >$ 组成一个Batch, 一次发给Main Model做校验
- 阶段3: accep): 选择$Head_1$预估token与label一致的最长$k$作为可接受的结果。
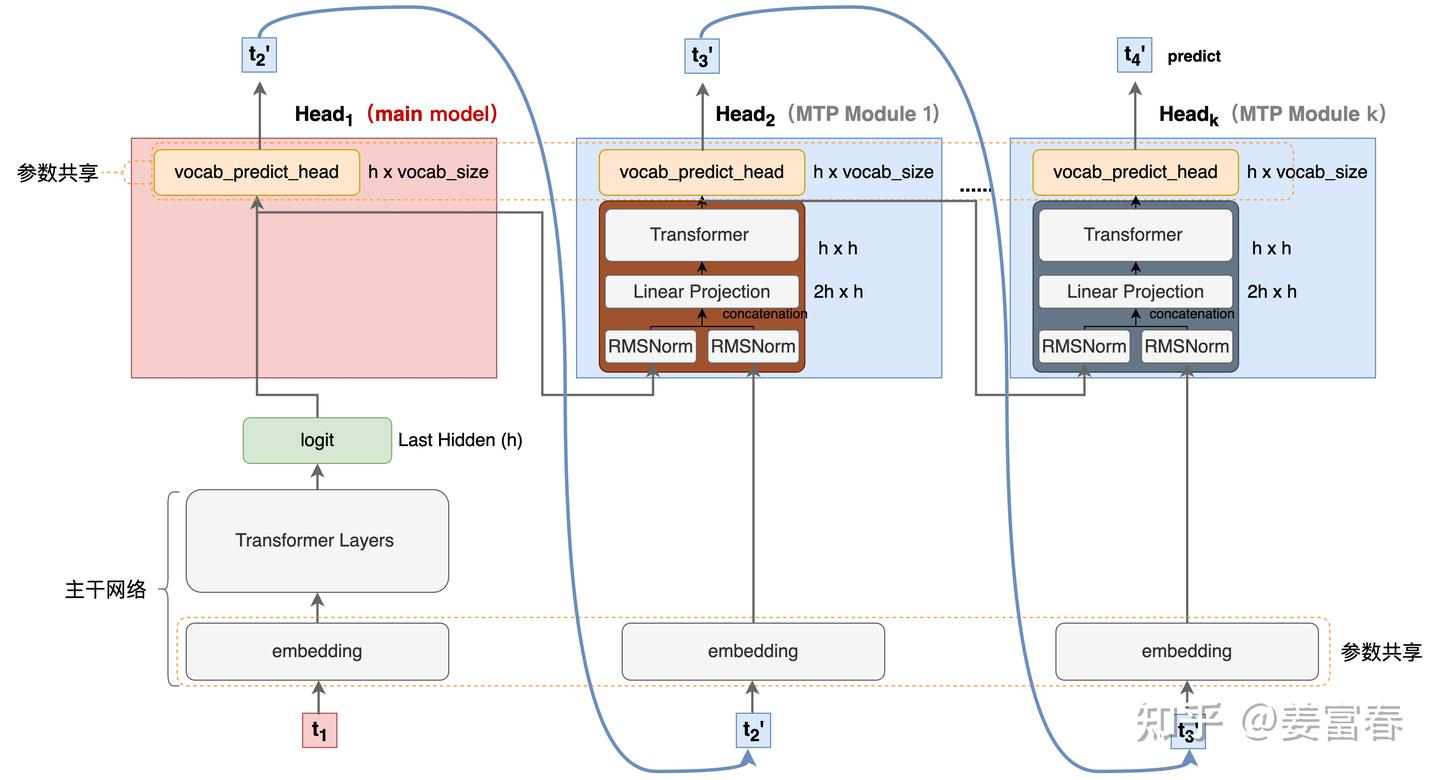
这里要再注意一个细节, 阶段1: predict(预测)的的流程图, 跟图9长得一样吗? 当然不一样。Teacher forcing只能用于训练阶段。推理阶段要用上一个状态的预估估值作为下一个状态的输入(free-running模式), 我也画了下推理阶段的流程图, 如图10所示:
参考资料
-
Blockwise Parallel Decoding for Deep Autoregressive Models, https://proceedings.neurips.cc/paper_files/paper/2018/file/c4127b9194fe8562c64dc0f5bf2c93bc-Paper.pdf ↩︎
-
No backlinks found.