Diffusion Model 的数学推导
| 英文 | 缩写 | 中文释义 |
|---|---|---|
| ViT | Vision Transformers | |
| CLIP | Contrastive Language-Image Pre-training | |
| DDPM1 | Denoising Diffusion Probabilistic Models | |
| DiT | Diffusion Transformers | |
| VAE | Variational AutoEncoder | |
| MAE | Masked AutoEncoder | |
| GAN | Generative Adversarial Networks | |
| U-Nets | ||
| BLIP | Bootstrapping Language-Image Pre-training for Unified Vision-Language Understanding and Generation | |
| CoCa | Contrastive Captioners are Image-Text Foundation Models | |
| LLaVA | ||
| GLIP | ||
| FID | Frechet Inception Distance | |
前置数学知识
贝叶斯定理
Bayes' theorem 2
$$
P(A \mid B) = \frac{P(A)P(B \mid A)}{P(B)}
$$
高斯分布
高斯分布 Gaussian distribution 3 也称作正态分布 Normal distribution,如果随机变量 $X$ 服从一个平均数为 $\mu$ ,标准差为 $\sigma$ 的正态分布,记为:
$$
X \sim \mathcal{N}(\mu,\sigma^{2})
$$
其概率密度函数为:
$$
f(x) = \frac{1}{\sigma \sqrt{2\pi}} e^{-\frac{(x-\mu)^2}{2\sigma^2}}
$$

当 $\mu = 1$,$\sigma =0$ 时,则称作标准正态分布 。
高斯混合模型
一个复杂的概率分布 $P (x)$ ,可以由多个高斯分布来表示,这即是高斯混合模型。高斯混合模型 Gaussian Mixture Model 是由多个高斯分布组成的模型,起概率密度函数位多个高斯概率密度函数的加权组合,即:
$$
P(x) = \sum_{i=1}^K P(z_i)P(x|z_i) = \sum_{i=1}^k w_i \mathcal{N}(x|\mu_i,\sigma_i^{2})
$$
其中 $w_i$ 为第 $i$ 个高斯分布的权重系数,并满足
$$
w_i \geq 0, \sum_{i=1}^K w_i = 1
$$

因此,假设我们要求一个复杂的概率分布 $P (x)$ ,只要我们知道了对于 $k$ 个高斯分布,其每一个 $w_m, \mu_m, \sigma_m$ ,就求解出来了这里的 $P (x)$ 。
KL 散度
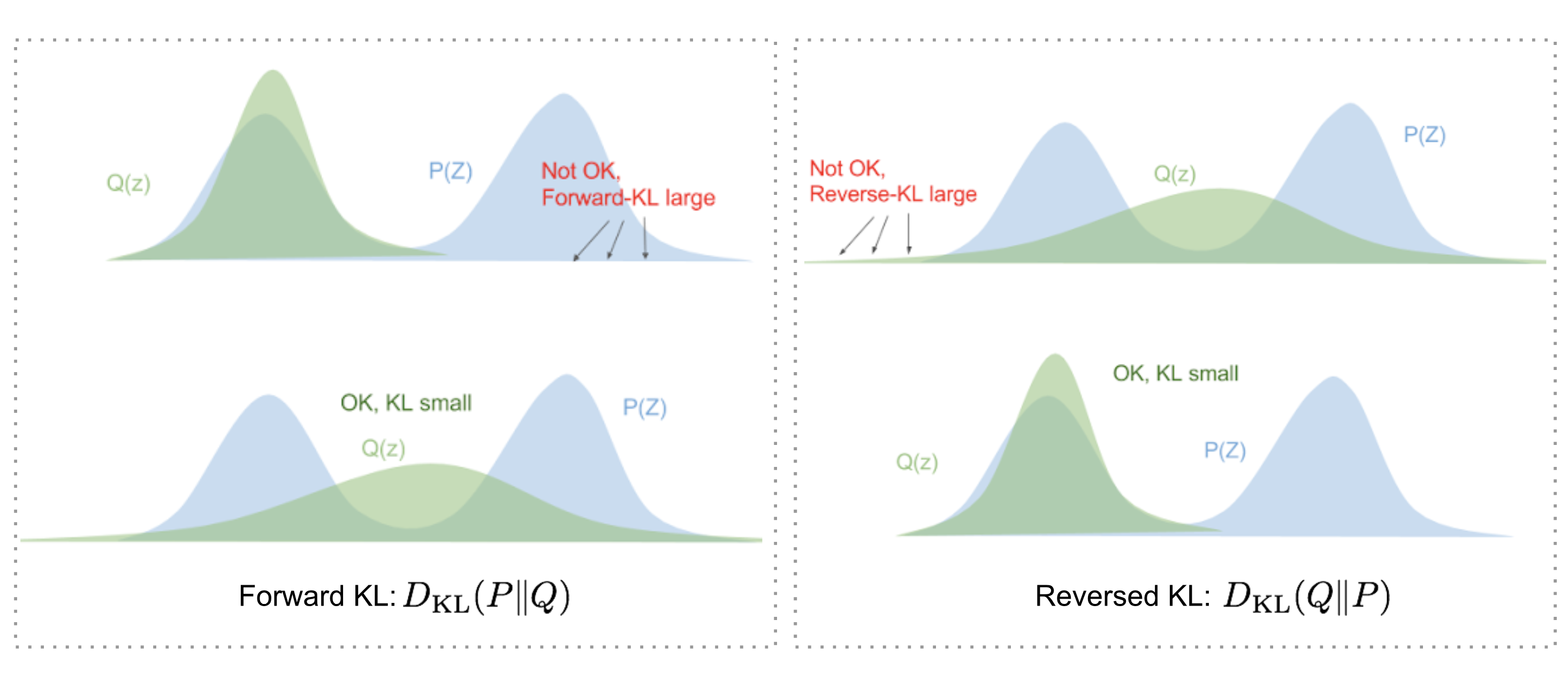
KL 散度 Kullback-Leibler Divergence 4 ,又称相对熵 relative entropy,是两个概率分布 $p$ 和 $q$ 差别的非对称性的度量
$$ \begin{align} D_{KL}(p||q) &= \sum_i^m p(x_i)log\frac{p(x_i)}{q(x_i)} \ &= -\sum_i^m p(x_i)log\frac{q(x_i)}{p(x_i)} \ &= - \intop_x p(x)log\frac{q(x)}{p(x)}dx (m \to \infty) \end{align} $$ 一般情况下,$P$ 表示数据的真实分布,$Q$ 表示数据的理论分布、估计的模型分布、或 $P$ 的近似分布。
KL 散度具有以下特性:
- 正定性: $D_{KL}(P||Q) \ge 0$
- 不对称性:$D_{KL}(P||Q) \ne D_{KL}(Q||P)$
从统计学上看,KL 散度可以用来衡量两个分布之间的差异程度。若二者差异越小,则 KL 散度越小,否则反之越大。当两分布一致时,其 KL 散度为 0。正是因为其可以衡量两个分布之间的差异,所以在 VAE、EM、GAN、Diffusion 模型中均有使用到 KL 散度。
对于两个单一变量的高斯分布 $p$ 和 $q$,其中 $p \sim \mathcal{N}(\mu_1,,\sigma_1^{2})$, $q \sim \mathcal{N}(\mu_2,,\sigma_2^{2})$,则他们的 KL 散度为: $$ D_KL(p||q) = log\frac{\sigma_2}{\sigma_1} + \frac{\sigma_1^2 + (\mu_1-\mu_2)^2}{2\sigma_2^2} - \frac{1}{2} $$
Jensen 不等式
AutoEncoder
- Encoder network
- Decoder network

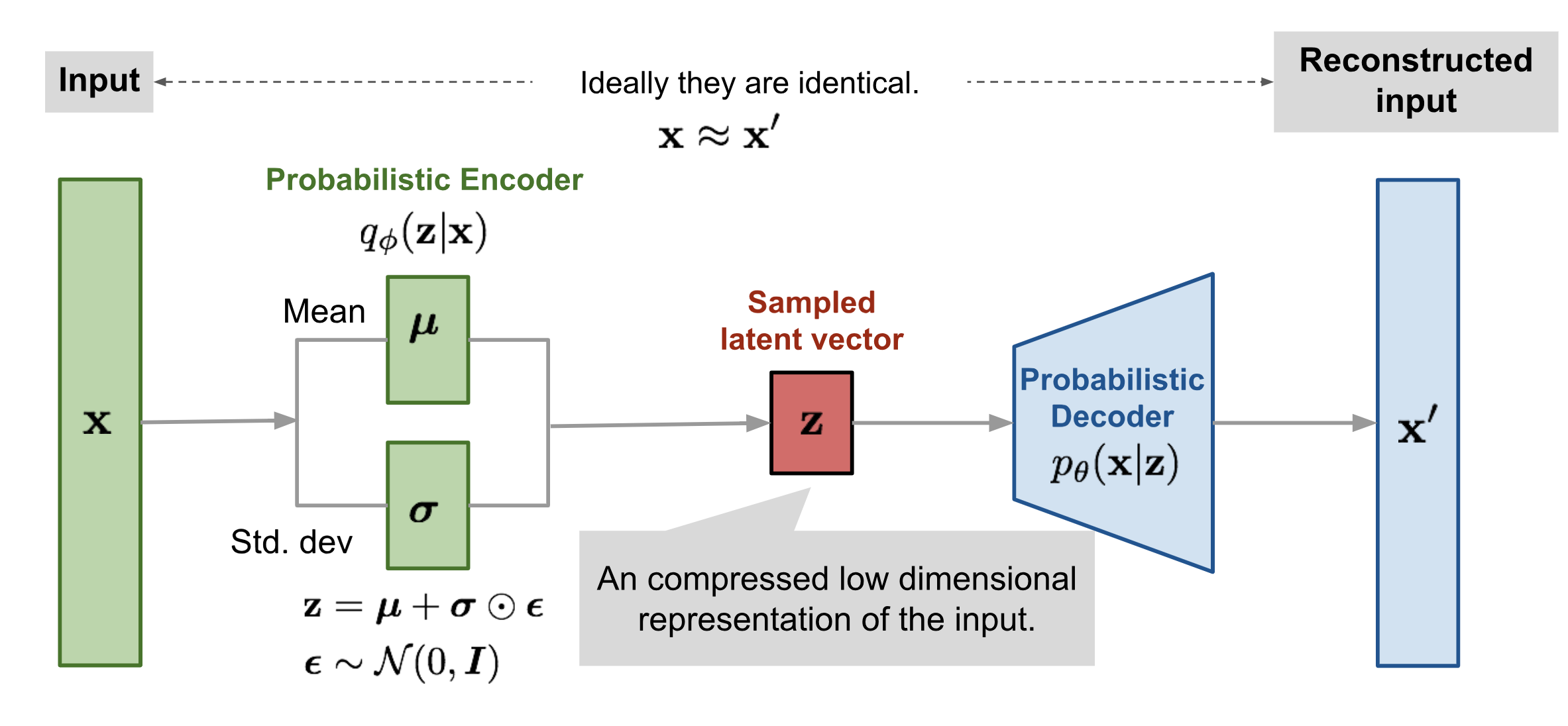
VAE
以李宏毅老师课程中的 Pokemon 样本为例,每一个 Pokemon 图 (h,w,c) 都可以定义成高维空间中的一个点,真实的数据样本在高维空间中存在着对应的概率分布 $P_{data} (x)$ 。
== 图
只要我们有一个模型,无论是 VAE 模型还是 Diffusion 模型,只要它预测的概率分布 $P_{\theta}(x)$ 能够和真实概率分布 $P _{data}(x)$ 尽可能近,那么我们随机从这个模型中采样,那么采样得到的样本就会和真实样本概率就会很大。比如从 Pokemon 数据集中训练出来的模型,sample 得到的样本会长得像 Pokemon。
按照高斯混合模型,我们用多个高斯分布去模拟真实样本的数据分布 $P_{data}(x)$ 。问题是这里的 $k$ 该取多少呢?不同高斯分布对应的比例 $P (z_i)$ 又如何表示呢?
我们用一个连续的标准高斯分布 $P (z)$ 来表示 $P (z_i)$,即 $P (z) \sim \mathcal{N}(1,0)$,则: $$ P_{\theta}(x) = \int P(z) P_{\theta}(x|z) $$
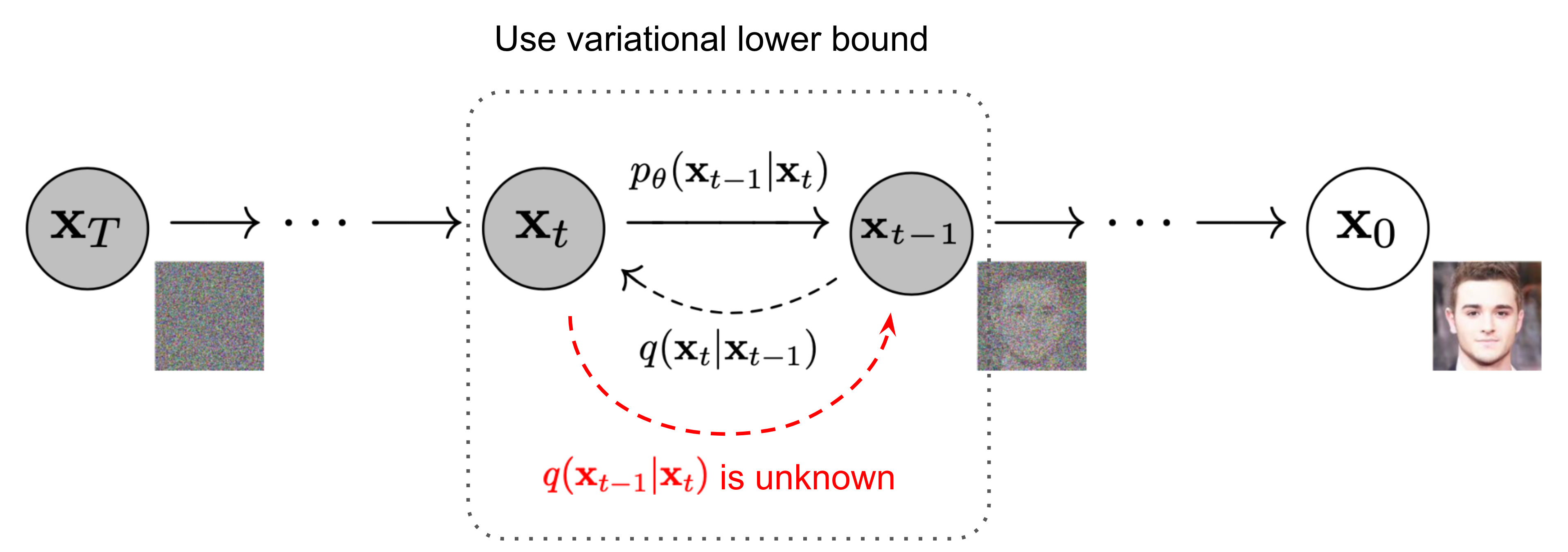
DDPM
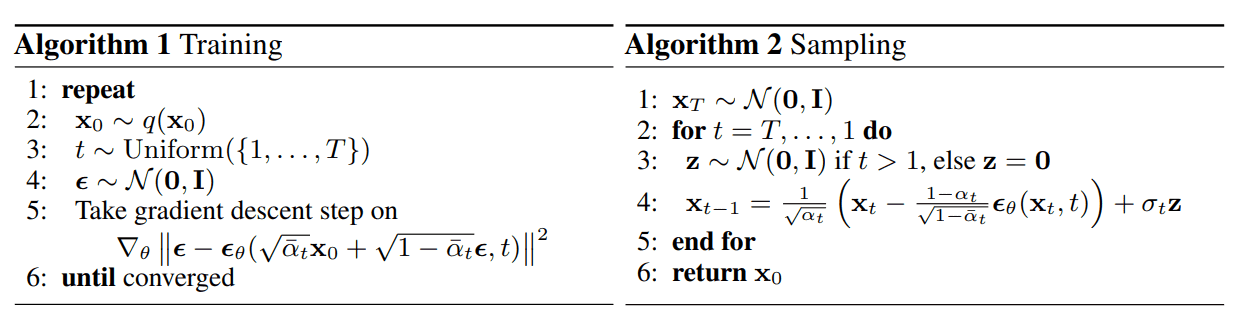
DDPM1 的本质是通过模型学习训练数据的分布,产出尽可能符合训练数据分布的真实图片。
-
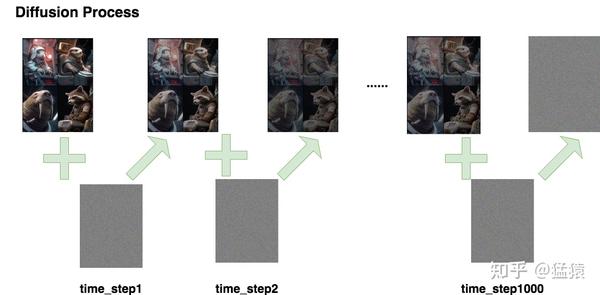
Diffusion Process,即 Forward Process,这个过程就是一步一步的加噪声
-
Denoise Process,即 Reverse Process,这个过程是一步一步的去噪
设置符号:
- $T$ :总步数
- $\mathbf{x_0}, \mathbf{x_1}, …, \mathbf{x_T}$ :每一步产生的图片,其中 $\mathbf{x_0}$ 是原始图片,$\mathbf{x_T}$ 为纯高斯噪声
- $\epsilon \sim \mathcal{N}(0,,1)$ :为每一步添加的高斯噪声
- $q(\mathbf{x_t} \mid \mathbf{x_{t-1}})$ :$\mathbf{x_t}$ 在条件 $\mathbf{x} = \mathbf{x_{t-1}}$ 下的概率分布,代表 diffusion process
- $p(\mathbf{x_{t-1}} \mid \mathbf{x_{t}})$ :$\mathbf{x_{t-1}}$ 在条件 $\mathbf{x} = \mathbf{x_t}$ 下的概率分布,代表 denoise process。
Diffusion Process
给定初始数据分布 $\mathbf{x_0} \sim q(\mathbf{x})$ ,我们定义一个前向扩散过程 forward diffusion process:
- 我们向数据分布中逐步添加高斯噪声,加噪过程持续 $T$ 次,产生一系列带噪声图片 $\mathbf{x_0}, \mathbf{x_1}, …, \mathbf{x_T}$
- 在由 $\mathbf{x_{𝑡−1}}$ 加噪到 $\mathbf{x_t}$ 的过程中,噪声的标准差/方差是以一个在区间 $(0,1)$ 内的固定值 $\beta_t$ 来确定的,均值是以固定值 $\beta_t$ 和当前时刻的图片数据 $\mathbf{x_{t-1}}$ 来确定的。
因此,根据以上流程
$$ \mathbf{x_t} = \mathbf{x_{t-1}} + \epsilon_{t-1} = \mathbf{x_0} + \epsilon_0 + \epsilon_1 + … + \epsilon $$
对于最后一步: $$ \mathbf{x_T} = \mathbf{x_{T-1}} + \epsilon_{T-1} = \mathbf{x_0} + \epsilon_0 + \epsilon_1 + … + \epsilon_{T-1} $$
其中:
$$ q (\mathbf{x_t} \mid \mathbf{x_{t-1}}) = \mathcal{N}(\mathbf{x_t}; \sqrt{1-\beta_t} \mathbf{x_{t-1}}, \beta_t \mathbf{I}) $$
$$ q(\mathbf{x_{1:T}} \mid \mathbf{x_0}) = \prod_{t=1}^T q (\mathbf{x_t} \mid \mathbf{x_{t-1}}) $$
上式意思是:
- 由 $\mathbf{x_{t−1}}$ 得到 $\mathbf{x_t}$ 的过程 $𝑞(\mathbf{x_t}|\mathbf{x_{t−1}})$ ,满足分布 $\mathcal{N}(\mathbf{x_t}; \sqrt{1-\beta_t} \mathbf{x_{t-1}}, \beta_t \mathbf{I})$
- 这个分布是指以 $\sqrt{1-\beta_t} \mathbf{x_{t-1}}$ 为均值,$\beta_t$ 为方差的高斯分布
- 我们看到这个噪声只由 $\beta_t$ 和 $\mathbf{x_{t−1}}$ 来确定,是一个固定值而不是一个可学习过程
- 因此,只要我们有了 $\mathbf{x_0}$ ,并且提前确定每一步的固定值,$\beta_1, \beta_2, …, \beta_T$ ,我们就可以推出任意一步的加噪数据 $\mathbf{x_1}, …, \mathbf{x_t}$
- 这里 Forward 加噪过程是一个马尔科夫链过程
随着 $t$ 的不断增大,最终原始数据 $\mathbf{x_0}$ 会逐步失去它的特征。最终当 $T \to \infty$ 时, $\mathbf{x_t}$ 趋近于一个各向独立的高斯分布。从视觉上来看,就是将原本一张完好的照片加噪很多步后,图片几乎变成了一张完全是噪声的图片。
重参数
在逐步加噪的过程中,我们其实并不需要一步一步地从 $\mathbf{x_0}, \mathbf{x_1},…$ 去迭代得到 $\mathbf{x_t}$ 。事实上,我们可以直接从 $\mathbf{x_0}$ 和固定值序列 ${{\beta_T \in (0, 1)}}_{t=1}^T$ 直接计算得到。
根据重参数技巧,我们可以一步推理出 $\mathbf{x_t}$,计算方法如下所示:
$$ \mathbf{x_t} = \sqrt{\bar{\alpha_t}} \mathbf{x_0} + \sqrt{1-\bar{\alpha_t}} \epsilon $$
推导过程为:
设置 $\alpha_t = 1 - \beta_t$ 以及 $\bar{\alpha_t} = \prod_{i=1}^t \alpha_i$
根据由 $\mathbf{x_{t−1}}$ 得到 $\mathbf{x_t}$ 的过程 $q(\mathbf{x_t}|\mathbf{x_{t−1}})$ ,满足分布 $\mathcal{N}(\mathbf{x_t}; \sqrt{1-\beta_t} \mathbf{x_{t-1}}, \beta_t \mathbf{I})$,有
$$ \mathbf{x_t} = \sqrt{1-\beta_t} \mathbf{x_{t-1}} + \beta_t \epsilon_{t-1} $$ 也就是: $$ \mathbf{x_t} = \sqrt{\alpha_t} \mathbf{x_{t-1}} + \sqrt{1-\alpha_t} \epsilon_{t-1} $$ 其中 $\epsilon_{t-1}, \epsilon_{t-2},… \sim \mathcal{N}(0,1)$ 为每一步添加的高斯噪声,进一步推导:
两个高斯分布分别服从 $\mathcal{N}(\mathbf{0}, \sigma_1^2\mathbf{I})$ 和 $\mathcal{N}(\mathbf{0}, \sigma_2^2\mathbf{I})$ ,则合并之后的概率分布满足 $\mathcal{N}(\mathbf{0}, (\sigma_1^2 + \sigma_2^2)\mathbf{I})$
对于上面公式,合并的概率密度标准差则为: $$ \sqrt{(1 - \alpha_t) + \alpha_t (1-\alpha_{t-1})} = \sqrt{1 - \alpha_t\alpha_{t-1}} $$
总结一下 diffusion process 过程中的公式:
直接递推公式,获得 $\mathbf{x_t}$ 和 $\mathbf{x_{t-1}}$ 的关系:
通过重参数技巧,获得 $\mathbf{x_t}$ 和 $\mathbf{x_0}$ 的关系,不再需要逐步递推:
一般地,我们随着 $t$ 的增大,数据越接近随机的高斯分布, $\beta_t$ 的取值的取值就越大。所以 $\beta_1 < \beta_2 < \dots < \beta_T$ ,同样的,$\bar{\alpha}_1 > \dots > \bar{\alpha}_T$ 。
Denoise Process
这里 $C(\mathbf{x_t}, \mathbf{x_0})$ 是一个关于 $\mathbf{x_t}$ 和 $\mathbf{x_0}$ ,而不包含 $\mathbf{x_{t-1}}$ 的函数,这里省去了具体细节。根据高斯分布的概率密度,这里的方差和均值可以分别写成:
根据 diffusion process 中推导的 $\mathbf{x_t}$ 和 $\mathbf{x_0}$ 的关系,我们有 $$ \mathbf{x}_0 = \frac{1}{\sqrt{\bar{\alpha}_t}}(\mathbf{x}_t - \sqrt{1 - \bar{\alpha}_t}\boldsymbol{\epsilon}_t) $$ 代入上式则有:
总结下 denoise process 过程中的公式
已知 $\mathbf{x_t}$ ,推导 $\mathbf{x_{t-1}}$ 的公式为:
优化目标
DDPM 的目标就是使得生成的图片尽可能符合训练数据的分布。
通过推导,优化目标从最开始的 令模型输出的分布逼近真实图片的分布 转变为 $argmax_{\theta} \prod_{i=1}^m P_{\theta}(x_i)$,也就是说,要使得连乘中的每一项最大,也等同于使得 $logP_{\theta}(x)$ 最大。
DDIM
Classifier Guidance
Classifier-free Guidance
Model Architecture
U-Net
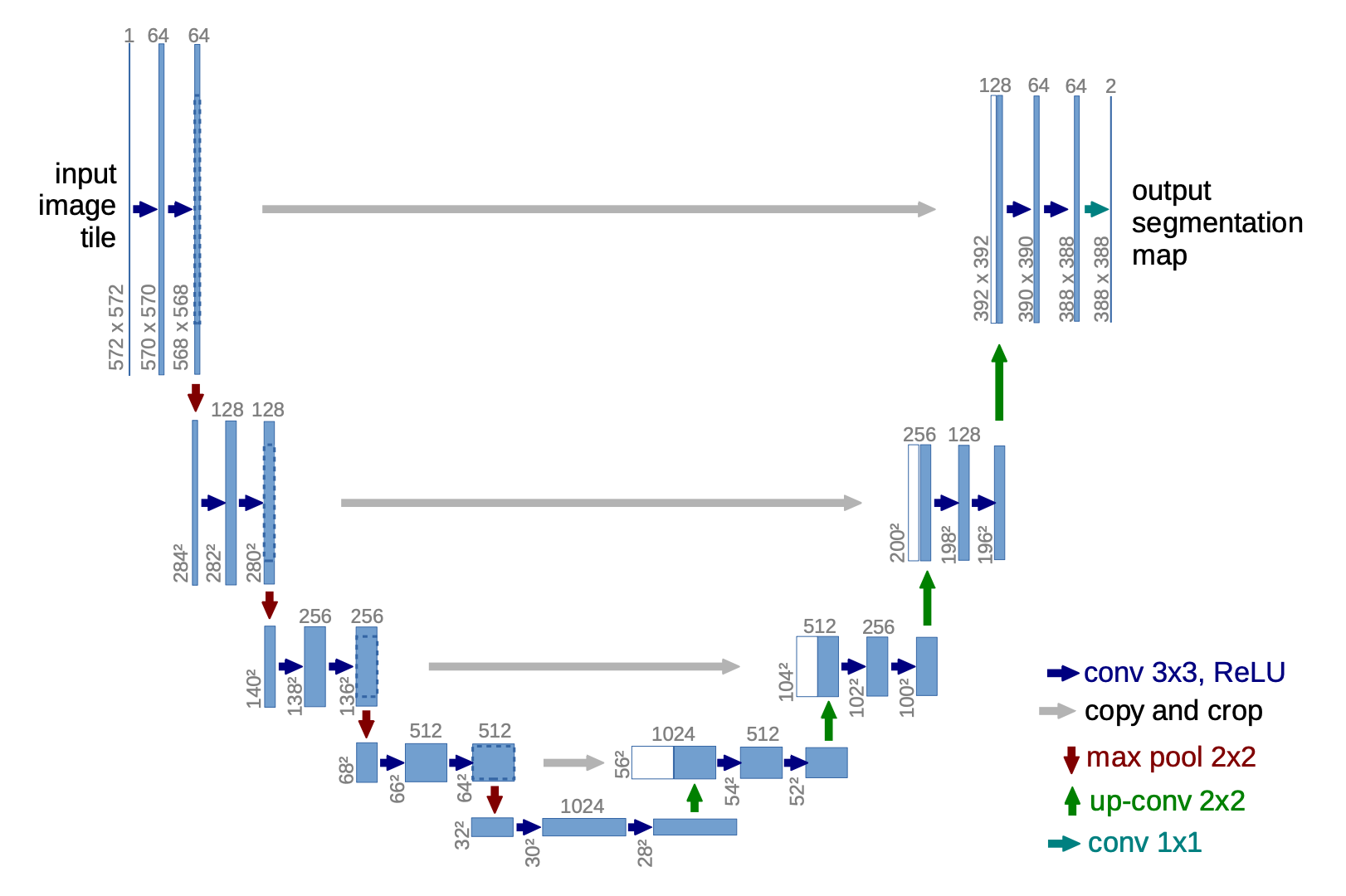
DownSampling
UpSampling
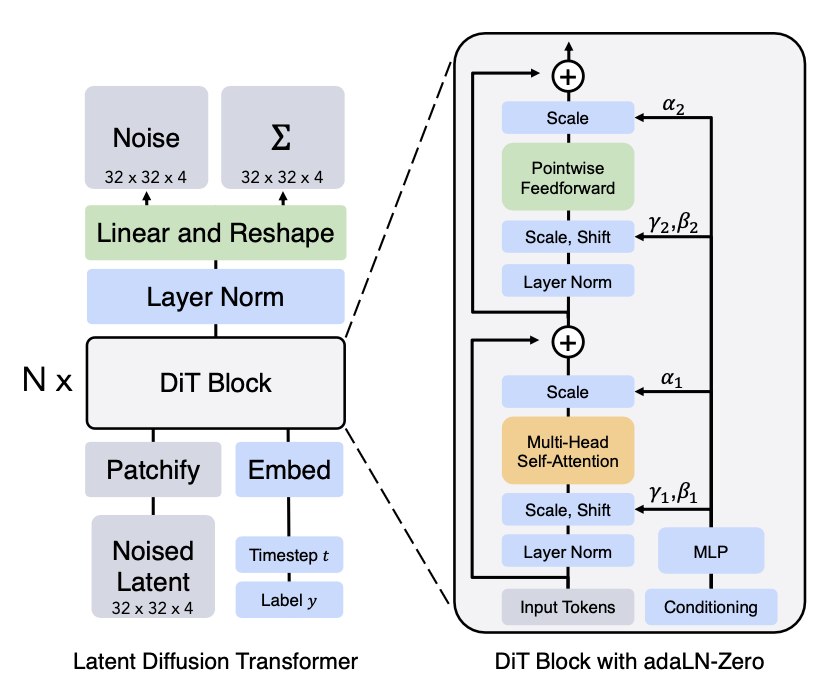
DiT
|
|
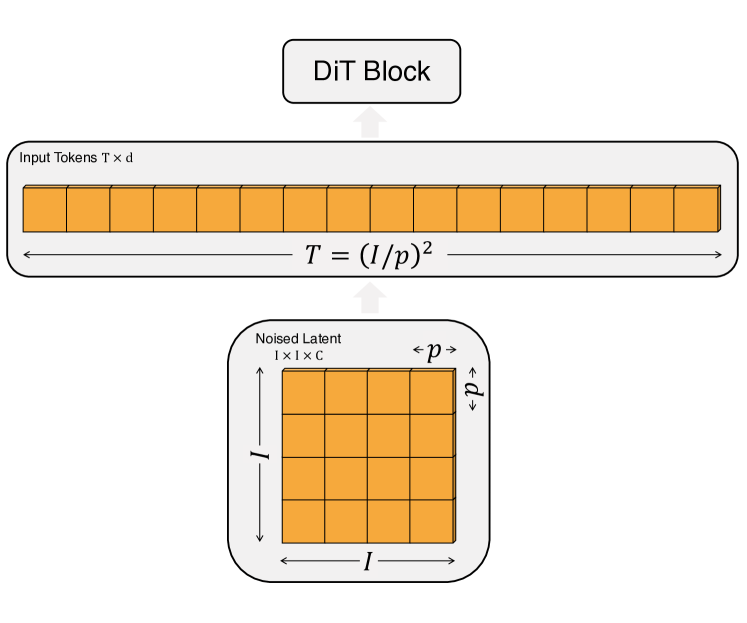
Patchify
输入到 DiT 的 tensor 已经是 noise latent,对应
input batch: N
input size: H, W
in channels: C
patch size: p
也就是 input 的 tensor shape 为 (N, H, W, C) 比如 (N, 32, 32, 4) 。经过 PatchEmbed,输出一系列的 Tokens,对应 token 的 shape 为:
- sequence length:
T = (H * W) / (p * p) = 32*32/(2*2)=256 - each patch dim:
patch_dim = p * p * C - 通过 MLP 将 patch 映射 D 大小的维度,patch embedding
(T, D)
|
|
DiTBlock
|
|
U-Net: Convolutional Networks for Biomedical Image Segmentation, https://arxiv.org/pdf/1505.04597 https://huggingface.co/blog/annotated-diffusion
-
Denoising Diffusion Probabilistic Models, Jonathan Ho, https://arxiv.org/pdf/2006.11239 ↩︎ ↩︎
-
https://en.wikipedia.org/wiki/Kullback%E2%80%93Leibler_divergence ↩︎
-
No backlinks found.