Pod 生命周期与状态
本文讲解的是 Kubernetes 中 Pod 的生命周期,包括生命周期的不同阶段、存活和就绪探针、重启策略等。
|
|
PodStatus 对象反映了 Pod 的状态,其数据结构如下所示:
|
|
Pod Phase
pod从创建到最后的创建成功会分别处于不同的阶段,在源码中用PodPhase来表示不同的阶段:
|
|
一个pod的完整创建,通常会伴随着各种事件的产生,k8s种事件的种类总共只有4种:
|
|
- Pending 创建pod的请求已经被k8s接受,但是容器并没有启动成功,可能处在:写数据到etcd,调度,pull镜像,启动容器这四个阶段中的任何一个阶段,pending伴随的事件通常会有:ADDED, Modified这两个事件的产生。
- Running pod已经绑定到node节点,并且所有的容器已经启动成功,或者至少有一个容器在运行,或者在重启中。
- Succeeded pod中的所有的容器已经正常的自行退出,并且k8s永远不会自动重启这些容器,一般会是在部署job的时候会出现。
- Failed pod中的所有容器已经终止,并且至少有一个容器已经终止于失败(退出非零退出代码或被系统停止)。
- Unknown 由于某种原因,无法获得pod的状态,通常是由于与pod的主机通信错误。
Pod 的 phase 是 Pod 在其生命周期中的简单宏观概述。该阶段并不是对容器或 Pod 的综合汇总,也不是为了做为综合状态机。Pod Phase的数量和含义是严格指定的。除了本文档中列举的状态外,不应该再假定 Pod 有其他的 phase 值。
下面是 phase 可能的值:
|
|
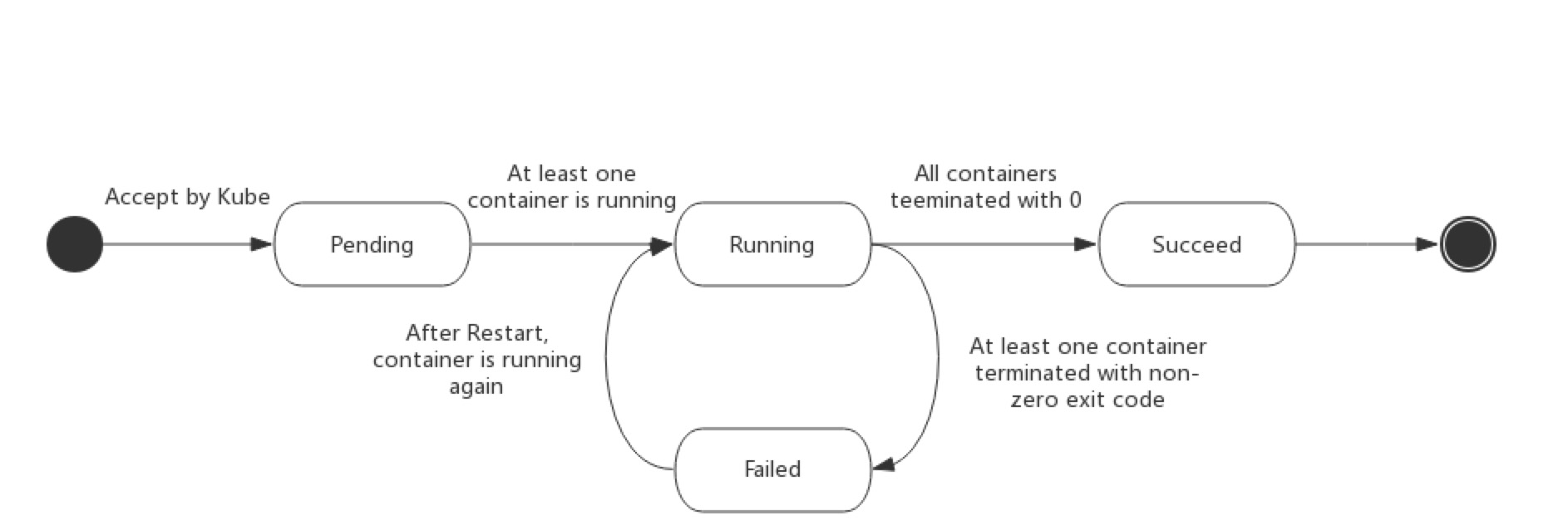
下图是Pod的生命周期示意图,从图中可以看到Pod状态的变化。
Pod Condition
PodStatus 对象中包含一个 PodCondition 数组。 PodCondition 数组的每个元素都有一个 type 字段和一个 status 字段
type字段是字符串,可能的值有 PodScheduled、Ready、Initialized、Unschedulable和ContainersReadystatus字段是一个字符串,可能的值有 True、False 和 Unknown。
|
|
Condition Type
|
|
- PodScheduled: Pod 的调度状态
- Initialized: Pod中的所有 Init Containers 已经初启动完毕
- ContainersReady: Pod中的所有的容器可以提供服务了
- Ready: Pod 可以提供服务,并且应该被加到匹配的负载均衡池中
Condition Status
代表了当前pod是否处于某一个阶段(PodScheduled,Ready,Initialized,ContainersReady),true 表示处于,false表示不处于。
Container State
|
|
容器探针
探针是由 kubelet 对容器执行的定期诊断。要执行诊断,kubelet 调用由容器实现的 Handler。有三种类型的处理程序:
- ExecAction:在容器内执行指定命令。如果命令退出时返回码为 0 则认为诊断成功。
- TCPSocketAction:对指定端口上的容器的 IP 地址进行 TCP 检查。如果端口打开,则诊断被认为是成功的。
- HTTPGetAction:对指定的端口和路径上的容器的 IP 地址执行 HTTP Get 请求。如果响应的状态码大于等于200 且小于 400,则诊断被认为是成功的。
每次探测都将获得以下三种结果之一:
- 成功:容器通过了诊断。
- 失败:容器未通过诊断。
- 未知:诊断失败,因此不会采取任何行动。
Kubelet 可以选择是否执行在容器上运行的两种探针执行和做出反应:
livenessProbe:指示容器是否正在运行。如果存活探测失败,则 kubelet 会杀死容器,并且容器将受到其 重启策略 的影响。如果容器不提供存活探针,则默认状态为Success。readinessProbe:指示容器是否准备好服务请求。如果就绪探测失败,端点控制器将从与 Pod 匹配的所有 Service 的端点中删除该 Pod 的 IP 地址。初始延迟之前的就绪状态默认为Failure。如果容器不提供就绪探针,则默认状态为Success。
该什么时候使用存活(liveness)和就绪(readiness)探针?
如果容器中的进程能够在遇到问题或不健康的情况下自行崩溃,则不一定需要存活探针; kubelet 将根据 Pod 的restartPolicy 自动执行正确的操作。
如果您希望容器在探测失败时被杀死并重新启动,那么请指定一个存活探针,并指定restartPolicy 为 Always 或 OnFailure。
如果要仅在探测成功时才开始向 Pod 发送流量,请指定就绪探针。在这种情况下,就绪探针可能与存活探针相同,但是 spec 中的就绪探针的存在意味着 Pod 将在没有接收到任何流量的情况下启动,并且只有在探针探测成功后才开始接收流量。
如果您希望容器能够自行维护,您可以指定一个就绪探针,该探针检查与存活探针不同的端点。
请注意,如果您只想在 Pod 被删除时能够排除请求,则不一定需要使用就绪探针;在删除 Pod 时,Pod 会自动将自身置于未完成状态,无论就绪探针是否存在。当等待 Pod 中的容器停止时,Pod 仍处于未完成状态。
readinessGates
自 Kubernetes 1.14(该版本 readinessGates GA,在1.11 版本是为 alpha)起默认支持 Pod 就绪检测机制扩展。
应用程序可以向 PodStatus 注入额外的反馈或信号:Pod readiness。要使用这个功能,请在 PodSpec 中设置 readinessGates 来指定 kubelet 评估 Pod readiness 的附加条件列表。
Readiness gates 由 Pod 的 status.condition 字段的当前状态决定。如果 Kubernetes 在 Pod 的 status.conditions 字段中找不到这样的条件,则该条件的状态默认为 “False”。
下面是一个例子。
|
|
您添加的 Pod 条件的名称必须符合 Kubernetes 的 label key 格式。
只有到 Pod 中的所有容器状态都是 Ready,且 Pod 附加的额外状态检测的 readinessGates 条件也是 Ready 的时候,Pod 的状态才是 Ready。
Pod 和容器状态
有关 Pod 容器状态的详细信息,请参阅 PodStatus 和 ContainerStatus。请注意,报告的 Pod 状态信息取决于当前的 ContainerState。
Restart Policy
PodSpec 中有一个 restartPolicy 字段,可能的值为 Always、OnFailure 和 Never。默认为 Always。 restartPolicy 适用于 Pod 中的所有容器。restartPolicy 仅指通过同一节点上的 kubelet 重新启动容器。失败的容器由 kubelet 以五分钟为上限的指数退避延迟(10秒,20秒,40秒…)重新启动,并在成功执行十分钟后重置。如 Pod 文档 中所述,一旦绑定到一个节点,Pod 将永远不会重新绑定到另一个节点。
Pod 的生命
一般来说,Pod 不会消失,直到人为销毁他们。这可能是一个人或控制器。这个规则的唯一例外是成功或失败的 phase 超过一段时间(由 master 确定)的Pod将过期并被自动销毁。
有三种可用的控制器:
-
使用 Job 运行预期会终止的 Pod,例如批量计算。Job 仅适用于重启策略为
OnFailure或Never的 Pod。 -
对预期不会终止的 Pod 使用 ReplicationController、ReplicaSet 和 Deployment ,例如 Web 服务器。 ReplicationController 仅适用于具有
restartPolicy为 Always 的 Pod。 -
提供特定于机器的系统服务,使用 DaemonSet 为每台机器运行一个 Pod 。
所有这三种类型的控制器都包含一个 PodTemplate。建议创建适当的控制器,让它们来创建 Pod,而不是直接自己创建 Pod。这是因为单独的 Pod 在机器故障的情况下没有办法自动复原,而控制器却可以。
如果节点死亡或与集群的其余部分断开连接,则 Kubernetes 将应用一个策略将丢失节点上的所有 Pod 的 phase 设置为 Failed。
示例
高级 liveness 探针示例
存活探针由 kubelet 来执行,因此所有的请求都在 kubelet 的网络命名空间中进行。
|
|
状态示例
- Pod 中只有一个容器并且正在运行。容器成功退出。
- 记录完成事件。
- 如果
restartPolicy为:- Always:重启容器;Pod
phase仍为 Running。 - OnFailure:Pod
phase变成 Succeeded。 - Never:Pod
phase变成 Succeeded。
- Always:重启容器;Pod
- Pod 中只有一个容器并且正在运行。容器退出失败。
- 记录失败事件。
- 如果
restartPolicy为:- Always:重启容器;Pod
phase仍为 Running。 - OnFailure:重启容器;Pod
phase仍为 Running。 - Never:Pod
phase变成 Failed。
- Always:重启容器;Pod
- Pod 中有两个容器并且正在运行。容器1退出失败。
- 记录失败事件。
- 如果 restartPolicy 为:
- Always:重启容器;Pod
phase仍为 Running。 - OnFailure:重启容器;Pod
phase仍为 Running。 - Never:不重启容器;Pod
phase仍为 Running。
- Always:重启容器;Pod
- 如果有容器1没有处于运行状态,并且容器2退出:
- 记录失败事件。
- 如果
restartPolicy为:- Always:重启容器;Pod
phase仍为 Running。 - OnFailure:重启容器;Pod
phase仍为 Running。 - Never:Pod
phase变成 Failed。
- Always:重启容器;Pod
- Pod 中只有一个容器并处于运行状态。容器运行时内存超出限制:
- 容器以失败状态终止。
- 记录 OOM 事件。
- 如果
restartPolicy为:- Always:重启容器;Pod
phase仍为 Running。 - OnFailure:重启容器;Pod
phase仍为 Running。 - Never: 记录失败事件;Pod
phase仍为 Failed。
- Always:重启容器;Pod
- Pod 正在运行,磁盘故障:
- 杀掉所有容器。
- 记录适当事件。
- Pod
phase变成 Failed。 - 如果使用控制器来运行,Pod 将在别处重建。
- Pod 正在运行,其节点被分段。
- 节点控制器等待直到超时。
- 节点控制器将 Pod
phase设置为 Failed。 - 如果是用控制器来运行,Pod 将在别处重建。
Kubelet
|
|
k8s pod 状态分析
以下通过创建一个pod来具体的看看从pod创建到成功所触发的事件,以及pod相关状态的改变
kubectl apply -f busybox.yaml
第一步:写入数据到etcd
|
|
第二步:开始被调度,但是还未调度到具体node上,请注意:PodScheduled的 status=“true”
|
|
第三步:被调度到了具体的node上hostip绑定了,并且被所有初始化容器已经启动完毕(注意我的busybox.yaml中pod没有指定init container,所以这里很快就被设置成true),被调度到的节点watch到并开始创建容器(此阶段是在拉去镜像)然后创建容器 ,而此时Ready的status是false,仔细看会发现,containerStatus的状态未waiting
|
|
第四步:容器创建成功,Ready的status=“true”,此时容器的status也为running,这个时候,对应的pod的PodPhase也应该为running
|
|
-
No backlinks found.