Diffusion Model 的数学推导
| 英文 | 缩写 | 中文释义 |
|---|---|---|
| ViT | Vision Transformers | |
| CLIP | Contrastive Language-Image Pre-training | |
| DDPM1 | Denoising Diffusion Probabilistic Models | |
| DiT | Diffusion Transformers | |
| VAE | Variational AutoEncoder | |
| MAE | Masked AutoEncoder | |
| GAN | Generative Adversarial Networks | |
| U-Nets | ||
| BLIP | Bootstrapping Language-Image Pre-training for Unified Vision-Language Understanding and Generation | |
| CoCa | Contrastive Captioners are Image-Text Foundation Models | |
| LLaVA | ||
| GLIP | ||
| FID | Frechet Inception Distance | |
前置数学知识
AutoEncoder
VAE
DDPM
DDPM1 的本质是通过模型学习训练数据的分布,产出尽可能符合训练数据分布的真实图片。
-
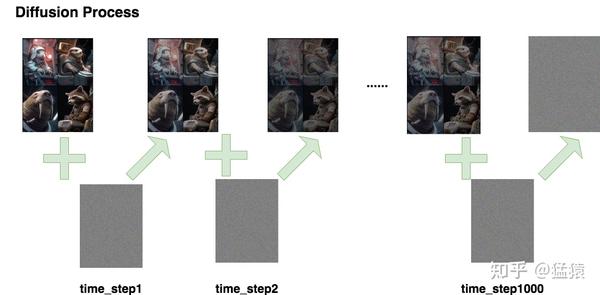
Diffusion Process,即 Forward Process,这个过程就是一步一步的去加噪声
-
Denoise Process,即 Reverse Process,这个过程是一步一步的去噪
设置符号:
- :总步数
- :每一步产生的图片,其中 是原始图片, 为纯高斯噪声
- :为每一步添加的高斯噪声
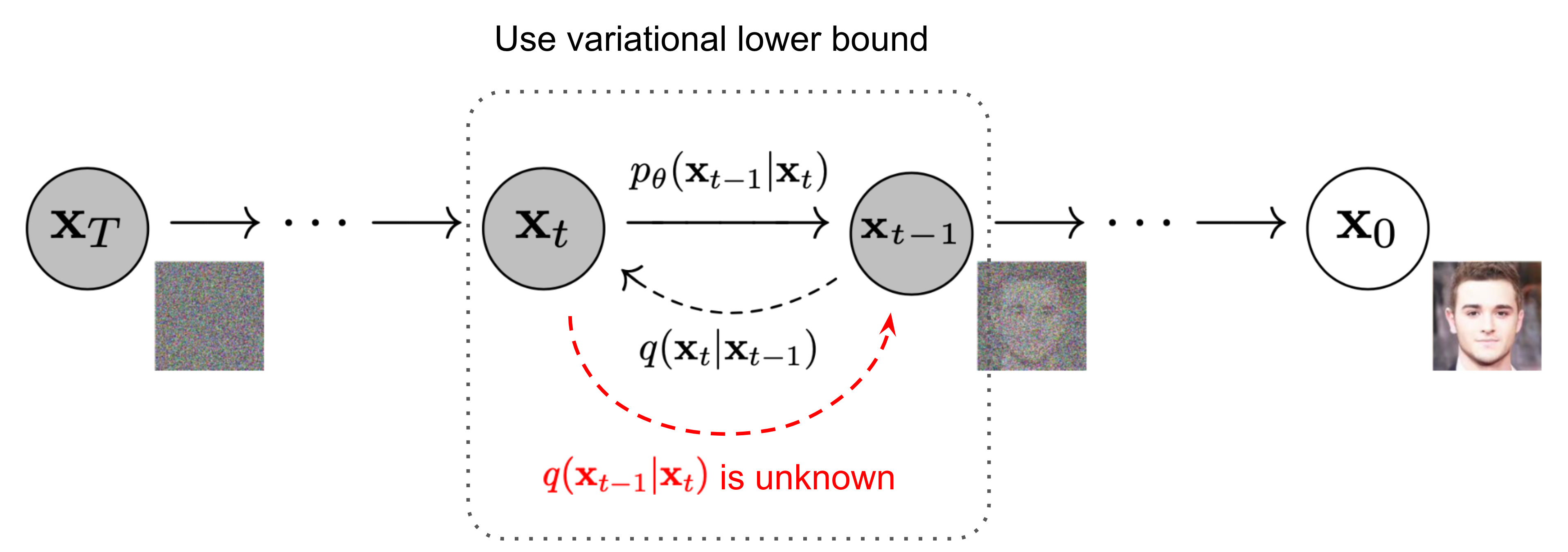
- $q(\mathbf{x}t \mid \mathbf{x}{t-1})\mathbf{x}t\mathbf{x} = \mathbf{x}{t-1}$ 下的概率分布
Forward Diffusion Process
给定初始数据分布 ,我们定义一个前向扩散过程 forward diffusion process:
- 我们向数据分布中逐步添加高斯噪声,加噪过程持续 次,产生一系列带噪声图片
- 在由 加噪到 $\mathbf{x}𝑡(0,1)\beta_t\beta_t\mathbf{x}{t-1}$ 来确定的。
因此,根据以上流程
$$ \mathbf{x}t = \mathbf{x}{t-1} + \epsilon_{t-1} = \mathbf{x}_0 + \epsilon_0 + \epsilon_1 + … + \epsilon $$
对于最后一步: $$ \mathbf{x}T = \mathbf{x}{T-1} + \epsilon_{T-1} = \mathbf{x}0 + \epsilon_0 + \epsilon_1 + … + \epsilon{T-1} $$
其中:
$$ q (\mathbf{x}t \mid \mathbf{x}{t-1}) = \mathcal{N}(\mathbf{x}t; \sqrt{1-\beta_t} \mathbf{x}{t-1}, \beta_t \mathbf{I}) $$
$$ q(\mathbf{x}_{1:T} \mid \mathbf{x}0) = \prod{t=1}^T q (\mathbf{x}t \mid \mathbf{x}{t-1}) $$
上式意思是:
- 由 得到 的过程 $𝑞(\mathbf{x}t|\mathbf{x}{t−1})\mathcal{N}(\mathbf{x}t; \sqrt{1-\beta_t} \mathbf{x}{t-1}, \beta_t \mathbf{I})$
- 这个分布是指以 为均值, 为方差的高斯分布
- 我们看到这个噪声只由 和 来确定,是一个固定值而不是一个可学习过程
- 因此,只要我们有了 ,并且提前确定每一步的固定值, ,我们就可以推出任意一步的加噪数据
- 这里 Forward 加噪过程是一个马尔科夫链过程
随着 的不断增大,最终原始数据 会逐步失去它的特征。最终当 时, 趋近于一个各向独立的高斯分布。从视觉上来看,就是将原本一张完好的照片加噪很多步后,图片几乎变成了一张完全是噪声的图片。
重参数
在逐步加噪的过程中,我们其实并不需要一步一步地从 去迭代得到 。事实上,我们可以直接从 $\mathbf{x}0{{\beta_T \in (0, 1)}}{t=1}^T$ 直接计算得到。
根据重参数技巧,我们可以一步推理出 ,计算方法如下所示:
推导过程为:
设置 , $\overline{\alpha}t = \prod{i = 1}^{T}\alpha_i\mathbf{x}{𝑡−1}\mathbf{x}𝑡𝑞(\mathbf{x}t|\mathbf{x}{t−1})\mathcal{N}(\mathbf{x}t; \sqrt{1-\beta_t} \mathbf{x}{t-1}, \beta_t \mathbf{I})$ \mathbf{x}t = \sqrt{1-\beta_t} \mathbf{x}{t-1} + \beta_t \epsilon{t-1} $$ 其中 $\epsilon{t-1}, \epsilon_{t-2},… \sim \mathcal{N}(0,,1)$ 为每一步添加的高斯噪声
$$ \mathbf{x}t = \alpha_t \mathbf{x}{t - 1} + (1 - \alpha_t) z_{t - 1}; \text{x}t{ where } z_{t - 1}, z_{t - 2}, \cdots \sim N(0, I) = \alpha_t \alpha_{t - 1} \mathbf{x}{t - 2} + (1 - \alpha_t \alpha{t - 1}) \overline{z}_{t-1} $$
DDIM
Stable Diffusion
-
No backlinks found.